Non-rigid point cloud registration
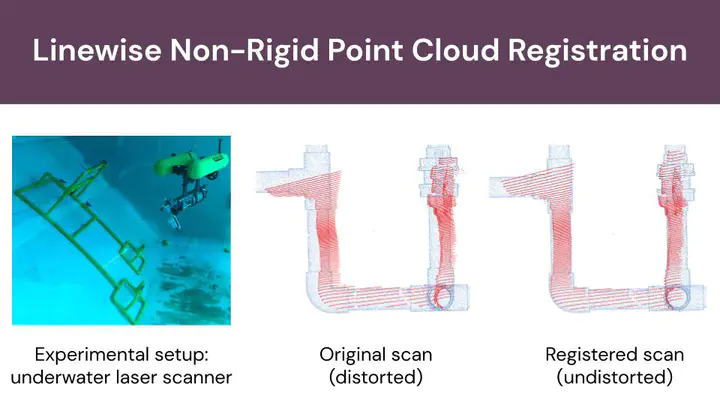
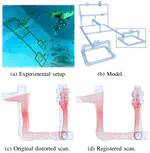
As final contribution of my PhD thesis, I developed a non-rigid point cloud registration method that was successfully used to remove the motion distortion of 3D scans acquired with our underwater laser scanner.
I presented this work at IROS22:
Miguel Castillón
Autonomous Navigation Lead
My main research interests include exploiting sensor perception for autonomous navigation and manipulation in challenging scenarios.