Hi!
I’m the autonomous navigation lead at Keybotic, a start-up developing four-legged robots for industrial inspections. Before this, I did my PhD on 3D perception and navigation of autonomous underwater robots: theory, software development and field tests. My main research interests intertwine numerical optimization and sensor perception for autonomous navigation in challenging scenarios.
Interests
- SLAM and autonomous navigation
- Optimization
- Sensor Perception
Education
PhD in Autonomous Robotics, 2023
University of Girona (Spain)
MSc in Robotics, 2018
KU Leuven (Belgium)
BSc in Industrial Engineering, 2015
University of Zaragoza (Spain)
Projects


Selected publications
Click here for the full list of publications.
During my research stay at ASL Zurich I developed a non-rigid point cloud registration method. You can check out the source code in this public repository.

Research experience
Autonomous Navigation Lead
Responsible for the mapping and the autonomous navigation of our four-legged robot Keyper to enable autonomous inspections of real industrial plants.
PhD Researcher
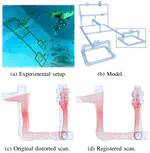
Enabling underwater robots to use range data from laser-based sensors for mapping and manipulation tasks. To this end we built an underwater laser scanner, which allowed me to face challenges ranging from sensor calibration to integration in autonomous platforms.
Visiting Researcher
Presented a new non-rigid point cloud registration algorithm that corrects motion distortion in dynamic scans, improving accuracy of localization and mapping tasks.
MSc Thesis
Developed a vision-based algorithm capable of reconstructing full-field vibrations of mechanical structures based on observations of natural-frequency deformations.
Research intern
Trained a ML classifier to assign ripeness category to berries detected by the autonomous strawberry picking robot.
BSc thesis
Compared different feature-based strategies to match 2D floor plan LiDAR scans for autonomous navigation.